
The much-hyped self-driving Google Car may have reached the end of the road, with its technology boss Chris Urmson, who led the project for seven years, resigning at the beginning of August.
The departure comes amid a move from Google to team up with the automotive industry, rather than challenge it, in the race for autonomy.
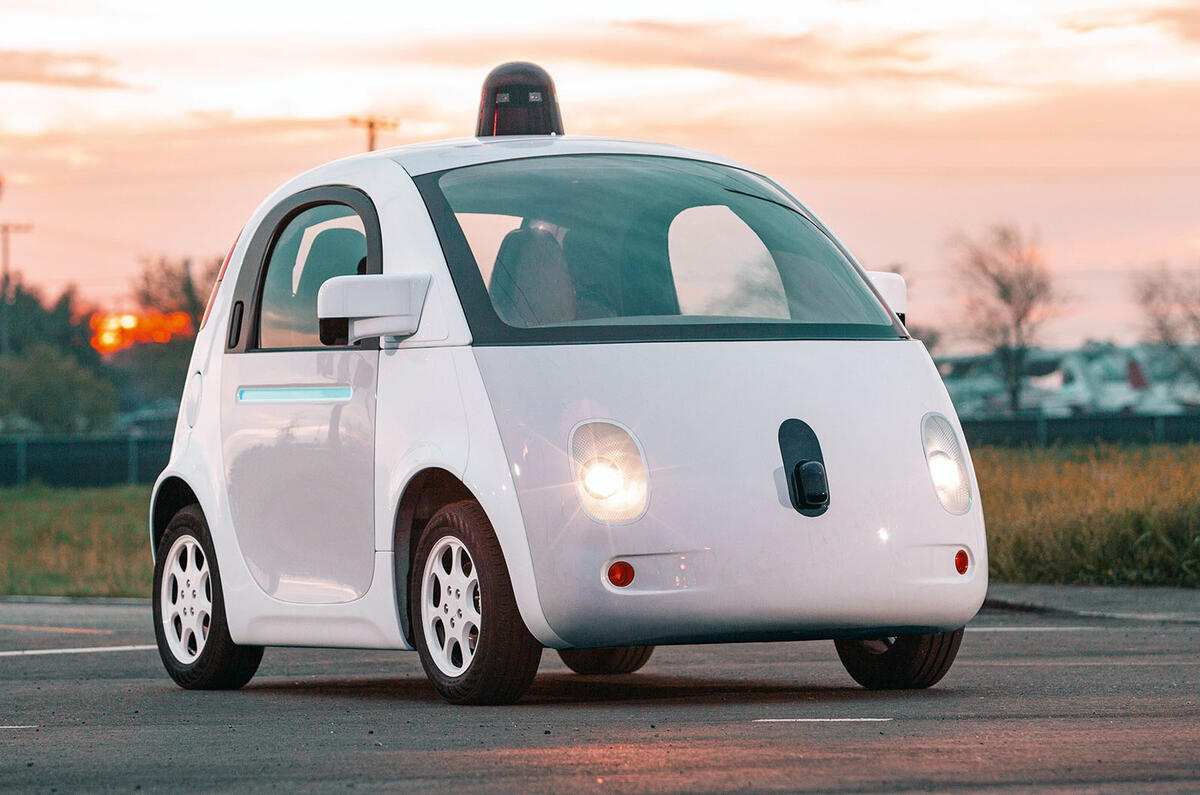
Read the latest on Google's Waymo self-driving cars project here
According to a note sent out by auto analysts at investment bank Evercore ISI, the Google car project was clearly in trouble. “The Google driverless project is likely not as advanced as many believe,” it said.
Speaking at Austin’s Southby-Southwest conference earlier this year about the timing of the project, Urmson said: “How quickly can we get this into people’s hands? If you read the papers, you see maybe it’s three years, maybe it’s 30 years. And I am here to tell you that honestly, it’s a bit of both.”
Perhaps one of the reasons for Urmson’s exit was the Google Car project’s philosophical U-turn performed last September, with the hiring of ex-Hyundai US boss John Krafcik as CEO of the Google self-driving project. Google has also just signed a deal with Fiat-Chrysler to build autonomous prototypes based on the company’s Chrysler Pacifica MPV, all of which suggests that any idea that Google would put its own self-driving cars into production now looks increasingly unlikely.
Perhaps such a tie-up with the car industry was inevitable. Despite the time spent on testing and development, the Google self-driving cars had covered a relatively modest 1.7m miles as of this summer. In stark contrast, Tesla claimed that, by May this year, drivers of its cars had clocked up 100 million miles with the Autopilot function engaged. While this is nowhere near the same as the intended full autonomy of the Google cars, it shows the huge disadvantage of trying to jump straight to a fully autonomous car from experimental vehicles.
Furthermore, not only do the Google cars have a selfimposed 25mph top speed, it took until 2011 for fully autonomous testing on public roads to become legal in the US, when Nevada changed its local laws. California — Google’s home state — didn’t change the law until this year. It is still only legal in four states.
However, California’s regulations contained one crucial clause, which could well have sunk the Google Car for good. Under Article 3.7, paragraph 227.18 of the order, it states: “A manufacturer shall not permit any of its autonomous vehicles to be operated on public roads in California when the operator is not seated in the driver’s seat and either monitoring its operations and able to take over physical control of the vehicle, or in physical control of the vehicle.”
The requirement for autonomous vehicles to have a conventional steering wheel and brake pedals was a major setback for a stand-alone Google car. It’s understood that Urmson was involved in political lobbying to try to get this clause rescinded. His departure makes this unlikely, especially as major car manufacturers are already testing conventional cars fitted with autonomous tech, such as Audi’s Audi A5 and Audi A7 prototypes.
But despite these departures and legislative hurdles, the Google project remains committed to seeing true self-serving vehicles, according to a recent Bloomberg interview with new project boss Krafcik.











