Jaguar Land Rover is working on a raft of technology that could enable its future production cars to drive autonomously off-road as well as on-road.
The research project aims to make JLR’s self-driving cars viable in a wide range of on- and off-road driving environments and conditions.
To enable autonomous all-terrain capability, JLR is working on new sensing technologies to provide the high levels of artificial intelligence required for the car to plan the route it should take.
New surface identification and 3D path sensing systems use camera, ultrasonic, radar and lidar sensors to give the car a 360-degree view of the world around it.
JLR says the combined power of the sensors is so advanced that the car could determine road surface characteristics, down to the width of a tyre, even in rain and falling snow, to plan its route.

Tony Harper, head of research for JLR, said: “We don’t want to limit future highly automated and fully autonomous technologies to tarmac. When the driver turns off the road, we want this support and assistance to continue.
“In the future, if you enjoy the benefits of autonomous lane keeping on a motorway at the start of your journey, we want to ensure you can use this all the way to your destination, even if this is via a rough track or gravel road.
“So whether it’s a road under construction with cones and a contraflow, a snow-covered road in the mountains or a muddy forest track, this advanced capability would be available to both the driver and the autonomous car, with the driver able to let the car take control if they were unsure how best to tackle an obstacle or hazard ahead.”
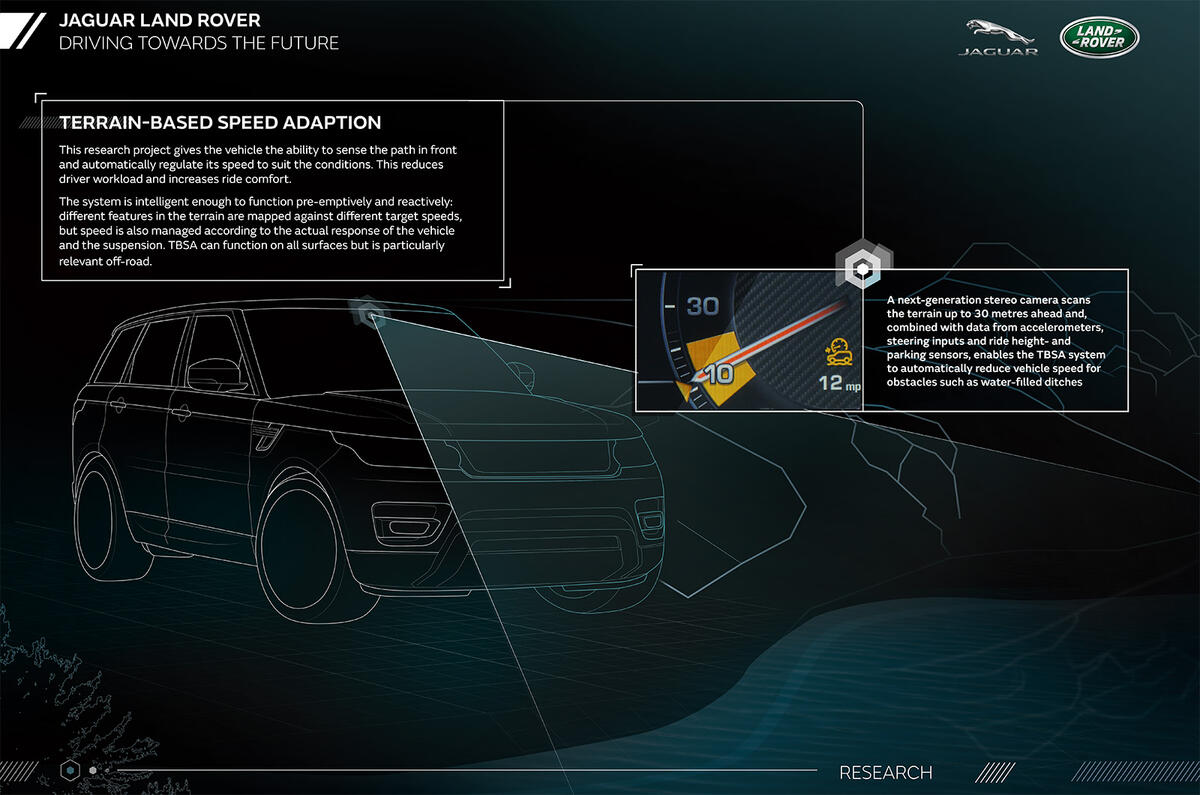
Ultrasonic sensors can identify surface conditions by scanning up to five metres ahead of the car, so the settings of JLR’s Terrain Response system could be automatically changed before the car drives from one surface to another. This will optimise all-terrain performance without loss of momentum or control.
To complete the 3D path, branches overhanging a track, or a car park overhead barrier would also need to be identified to determine if the route ahead is clear.
Harper said: “The key enabler for autonomous driving on any terrain is to give the car the ability to sense and predict the 3D path it is going to drive through.
“This means being able to scan and analyse both the surface to be driven on, as well as any hazards above and to the sides of the path ahead. This might include car park barriers, tree roots and boulders or overhanging branches, as well as the materials and topography to be driven on.”
")